搜索结果
Powered by: Simple-Jekyll-Search
![[算法题]CSP 2022汇总](/images/default_cover.webp)
CCF CSP第28次认证的真题及解析
- 时间限制: 1.0s
- 内存限制: 512.0MB
- 问题描述:
- 评估一个长期项目的投资收益,资金的时间价值是一个必须要考虑到的因素。简单来说,假设银行的年利率为$5\%$,那么当前的$100$ 元一年后就会变成$105$元,两年后变成$110.25$元。因此,现在收到$100$元比两年后收到$100$元收益更多,两年后再支出$100$元会比立刻支出$100$元更加划算。
- 基于上述分析,我们使用如下的模型来衡量时间价值:假设银行的年利率为$i$,当前(第$0$年)的$x$元就等价于第$k$年的$x\times(1+i)^k$元;相应的,第$k$年的$x$元的当前价值实际为$x\times(1+i)^{-k}$元。
- 现给出某项目未来$n$年的预计收入支出情况,在将所有款项转换为当前价值后,试计算该项目的总收益。
- 输入格式:
- 从标准输入读入数据。
- 输入的第一行包含空格分隔的一个正整数$n$和一个实数$i$,分别表示年数和银行年利率。
- 输入的第二行包含空格分隔的$n+1$个整数,依次表示该项目第$0,1,\cdots,n$年的预计收入(正数)或支出(负数)。
- 输出格式:
- 输出到标准输出中。
- 输出一个实数,表示该项目在当前价值标准下的总盈利或亏损。
- 子任务:
- 全部的测试数据满足$0<n\leq 50,0<i<1$,且$i$的有效数字不多于$3$位,每年预计收入(正数)或支出(负数)的绝对值不大于$1000$。
- 提示:
- C/C++:建议使用
double类型存储浮点数,并使用scanf("%lf", &x);进行输入,printf("%f", x);进行输出。- Python:直接使用
print(x)进行输出即可。- Java:建议使用
double类型存储浮点数,可以使用System.out.print(x);进行输出。
2 0.05
-200 100 100
-14.059
n, i = input().split(" ")
n, i = int(n), float(i)
nums = [int(j) for j in input().split(" ")] # 获取数据
sum = 0
for j in range(len(nums)):
sum += nums[j] * pow(1 + i, -j)
print(sum)
#include <stdio.h>
#include <math.h>
int main()
{
int n;
double i, sum = 0;
scanf("%d", &n);
scanf("%lf", &i);
for (int j = 0; j <= n; j++)
{
int temp;
scanf("%d", &temp);
sum += temp * pow(1 + i, -j);
}
printf("%f", sum);
return 0;
}
import java.util.List;
import java.util.ArrayList;
import java.util.Scanner;
class Main {
public static void main(String[] args) {
Scanner sc = new Scanner(System.in);
double sum = 0;
int n = sc.nextInt();
double i = sc.nextDouble();
List<Integer> nums = new ArrayList<Integer>();
for (int j = 0; j <= n; j++) {
nums.add(sc.nextInt());
}
sc.close();
for (int j = 0; j < nums.size(); j++) {
sum += nums.get(j) * Math.pow(1 + i, -j);
}
System.out.println(sum);
}
}
| 代码长度 | 编程语言 | 评测结果 | 得分 | 时间使用 | 空间使用 |
|---|---|---|---|---|---|
| 195B | PYTHON | 正确 | 100 | 31ms | 8.035MB |
| 295B | CPP11 | 正确 | 100 | 15ms | 2.687MB |
| 584B | JAVA | 正确 | 100 | 109ms | 23.72MB |
- 时间限制: 1.0s
- 内存限制: 512.0MB
\[M'_{ij}=\frac{1}{4}\sum^7_{u=0}\sum^7_{v=0}\alpha(u)\alpha(v)M_{u,v}cos(\frac{\pi}{8}(i+\frac{1}{2})u)cos(\frac{\pi}{8}(j+\frac{1}{2})v)\] \[\alpha(u)=\begin{cases}\sqrt{\frac{1}{2}} & u=0\\1 & u\neq0\end{cases}\]
- 问题背景:
- 四年一度的世界杯即将画上尾声。在本次的世界杯比赛中,视频助理裁判(Video Assistant Referee, VAR)的应用可谓是大放异彩。VAR 使用视频回放技术帮助主裁判作出正确判罚决定。西西艾弗岛足球联赛的赛场上也引入了一套 VAR 设备。作为技术供应商的技术主管小C,需要存储和编码 VAR 产生的图像数据。小 C 分析比较发现,JPEG 编码算法可以达到较好的压缩效果,并且质量损失是可以接受的。因此,小 C 决定使用 JPEG 编码算法来存储和传输图像数据。JPEG 是一种常用的图片有损压缩算法,它的压缩率高,但是压缩后的图片质量下降较多。JPEG 图片的压缩率一般在 10:1 到 20:1 之间,一般用于存储照片等图片质量要求不高的场景。
- 为了简化问题,我们以灰度图片为例,介绍 JPEG 编码算法的过程。一张灰度图片,可以被视为由多个像素点组成。每个像素点对应一个 0 到 255 之间的数值,用于表示像素点的亮度。JPEG 编码算法将图片分割为$8\times8$的小块,每个小块被称作一个最小编码单元。对每个小块进行如下的计算:
- 将每个像素点的数值减去 128,使得每个像素点的数值都在 -128 到 127 之间。
- 将每个小块的像素点排成一个$8\times8$的矩阵,并对矩阵进行离散余弦变换(DCT)。进行离散余弦变换后,仍然得到一个$8\times8$的矩阵,矩阵中的每个元素都是实数,并且所得矩阵的左上方的数字的绝对值较大,右下方的数字的绝对值较小,甚至接近 0。
- 对矩阵进行量化操作。量化操作是指将矩阵中的每个元素都除以一个数字,并取整数。量化操作的目的是为了减少矩阵中的数据,从而减少编码后的文件大小。量化操作的数字越大,矩阵中的数据就越少,但是压缩后的图片质量也会越差。
- 对矩阵进行 Z 字形扫描。Z 字形扫描是指从左上角开始,沿着 Z 字形的路径扫描矩阵中的元素,将扫描到的元素依次排成一个数组,由于 Z 字形扫描的路径是从左上角到右下角,数组结尾处可能存在着连续的 0,为了节省空间,可以不存储这些连续的 0。得到的数据被称为扫描数据。
- 最后,将得到的各个小块的扫描数据采用哈夫曼编码进行压缩,并置于必要的数据结构中,就能得到一张 JPEG 图片了。
- 问题描述:
- 在本题中,你需要实现一个能够解码 JPEG 图片的一个最小编码单元的程序。解码的步骤与上述编码的步骤相反,具体的步骤是:
- 读入量化矩阵$Q_{i,j}$,其中$i,j$的取值范围为$0-7$。
- 初始化一个$8\times8$的矩阵$M$,令$M_{i,j}=0$。
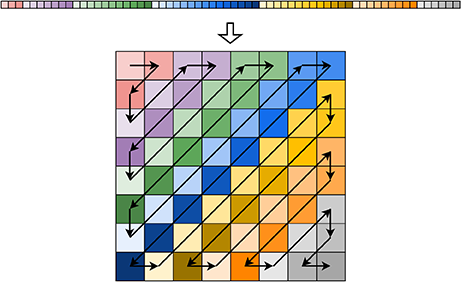
- 读入扫描数据,将扫描数据按照这样的顺序写入矩阵$M$:从左上角$M_{0,0}$开始,接下来填充它的右侧相邻的元素$M_{0,1}$,然后依次向左下方填充直至$M_{1,0}$,接下来从它下侧相邻的元素$M_{2,0}$开始,依次向右上方填充直至$M_{0,2}$,依次类推,循环往复,直至填充满整个矩阵或用尽所有扫描数据,如图所示。
- 将矩阵$M$中的每个元素都乘以量化矩阵$Q$中的对应元素。
- 对矩阵$M$进行离散余弦逆变换,得到一个$8\times8$的矩阵$M’$。其中,逆变换的公式如下:
- 将矩阵$M’$中的每个元素都加上$128$,并取最接近的整数(四舍五入)。如果得到的整数大于$255$,则取$255$;如果得到的整数小于$0$,则取$0$。得到的矩阵即为解码后的图片。
- 输入格式:
- 从标准输入读入数据。
- 输入的前 8 行,每行有空格分隔 8 个正整数,是量化矩阵。
- 接下来的 1 行是 1 个正整数$n$,表示扫描数据的个数。
- 接下来的 1 行是 1 个数字$T$,取值为 0、1 或 2,表示要进行的任务。
- 接下来的 1 行,有空格分隔的$n$各整数,是扫描数据。
- 输出格式:
- 输出到标准输出中。
- 输出共 8 行,每行有 8 个空格分隔的整数,表示一个图像矩阵。
- 当$T$取 0 时,输出填充(步骤 3)后的图像矩阵;当$T$取 1 时,输出量化(步骤 4)后的图像矩阵;当$T$取 2 时,输出最终的解码结果。
- 子任务:
- 对于 20% 的数据,有$T=0$;
- 对于 40% 的数据,有$T=0$或$1$;
- 对于 100% 的数据,有$T\in {0,1,2}$,且$n\in[0,64]$,并且量化矩阵中的各个元素$q_{i,j}$满足$0<q_{i,j}<256$,扫描序列中的各个元素$m_i$满足$-256<m_i<256$。
- 提示:
- 在 C/C++ 语言中,可以通过包含 math.h(C 语言)或 cmath(C++ 语言)来使用数学函数。$\pi$的值可以通过表达式 acos(-1) 获得。
- 在 Python 语言中,可以通过 from math import pi 引入$\pi$。
- 在 Java 语言中,可以使用 Math.PI 来获取$\pi$的值。
from math import pi, cos, sqrt
def calcAlpha(u):
return sqrt(0.5) if u == 0 else 1
# 处理输入数据
Q = []
for i in range(8):
Q.append([int(i) for i in input().split(" ")])
n, T = int(input()), int(input())
scanData = [int(i) for i in input().split(" ")]
# 计算M
M = [[0 for _ in range(8)] for _ in range(8)] # 初始化M
i, j = 0, 0
# 填充数据
down = False
while scanData and i < 8 and j < 8:
M[i][j] = scanData.pop(0)
if down:
if j == 0: # 说明已经在down方向上到了最后一列,该换方向了
down = False
i += 1
else: # 还没到最后一行,继续向下
i += 1
j -= 1
else:
if i == 0: # 说明已经在up方向上到了第一行,该换方向了
down = True
j += 1
else: # 还没到第一行,继续向上
i -= 1
j += 1
# 计算M.*Q
M2 = [[M[i][j] * Q[i][j] for j in range(8)] for i in range(8)]
# 离散余弦逆变换+第6步变换
M3 = [[0 for _ in range(8)] for _ in range(8)] # 初始化M3
for i in range(8):
for j in range(8):
temp = 0
for u in range(8):
for v in range(8):
temp += (calcAlpha(u) * calcAlpha(v) * M2[u][v] * cos(pi / 8 * (i + 0.5) * u) * cos(
pi / 8 * (j + 0.5) * v)) / 4
temp2 = round(temp + 128)
if temp2 > 255:
temp2 = 255
elif temp2 < 0:
temp2 = 0
M3[i][j] = temp2
# 输出结果
if T == 0:
for row in M:
print(" ".join([str(i) for i in row]))
elif T == 1:
for row in M2:
print(" ".join([str(i) for i in row]))
elif T == 2:
for row in M3:
print(" ".join([str(i) for i in row]))
#include <stdio.h>
#include <math.h>
#include <string.h>
/*
* 注:该解法逻辑上应该是没问题的,因为精度原因过不去
*/
double calcAlpha(double u) {
if (u < 1e-6) {
return sqrt(0.5);
} else {
return (double) 1.0;
}
}
int main() {
int Q[8][8];
double M[8][8], M2[8][8], M3[8][8];
int scanData[64];
int n, T;
// 处理输入数据
for (int i = 0; i < 8; i++)
for (int j = 0; j < 8; j++)
scanf("%d", &Q[i][j]);
scanf("%d%d", &n, &T);
for (int i = 0; i < n; i++)
scanf("%d", &scanData[i]);
// 计算M
memset(M, 0, sizeof(M));
int i = 0, j = 0, down = 0, scanData_cursor = 0;
// 填充数据
while (scanData_cursor < n && i < 8 && j < 8) {
M[i][j] = scanData[scanData_cursor];
scanData_cursor++;
if (down) {
if (j == 0) {
i++;
down = 0;
} else {
i++;
j--;
}
} else {
if (i == 0) {
j++;
down = 1;
} else {
i--;
j++;
}
}
}
// 计算M.*Q
for (int i = 0; i < 8; i++)
for (int j = 0; j < 8; j++)
M2[i][j] = M[i][j] * Q[i][j];
// 离散余弦逆变换+第6步变换
memset(M3, 0, sizeof(M3));
for (int i = 0; i < 8; i++) {
for (int j = 0; j < 8; j++) {
double temp = 0, temp2;
for (int u = 0; u < 8; u++) {
for (int v = 0; v < 8; v++) {
temp += (calcAlpha(u) * calcAlpha(v) * M2[u][v] * cos(acos(-1) / 4.0 * (i + 0.5) * u) *
cos(acos(-1) / 4.0 * (j + 0.5) * v)) / 4.0;
}
}
temp2 = round(temp + 128);
if (temp2 > 255) temp2 = 255;
else if (temp2 < 0) temp2 = 0;
M3[i][j] = temp2;
}
}
// 输出结果
if (T == 0) {
for (int i = 0; i < 8; i++) {
for (int j = 0; i < 8; i++) {
printf("%d ", (int) M[i][j]);
}
printf("\n");
}
} else if (T == 1) {
for (int i = 0; i < 8; i++) {
for (int j = 0; i < 8; i++) {
printf("%d ", (int) M2[i][j]);
}
printf("\n");
}
} else if (T == 2) {
for (int i = 0; i < 8; i++) {
for (int j = 0; i < 8; i++) {
printf("%d ", (int) M3[i][j]);
}
printf("\n");
}
}
}
| 代码长度 | 编程语言 | 评测结果 | 得分 | 时间使用 | 空间使用 |
|---|---|---|---|---|---|
| 1.720KB | PYTHON | 运行超时 | 40 | 运行超时 | 8.007MB |
| 4.520KB | CPP11 | 错误 | 40 | 15ms | 3.023MB |
- 时间限制: 2.0s
- 内存限制: 512.0MB
- 问题描述:
- 光线追踪是计算机图形学领域的一个重要算法,其原理是追踪一束从光源发出的光,经过不同的反射面,最终到达摄像机处的过程。
- 在这道问题中,你需要实现一段程序来处理一个简易的光线追踪模型。
- 在平面中有一些反射面,为方便起见,我们设这些反射面都是线段,与坐标轴成$45$度角摆放,且两个端点的坐标均为整数。为进一步简化问题,我们假设所有的反射表面都是镜面反射。任何一束光线照射到反射面上(为避免讨论,假设反射面不含端点)时,都会改变方向为相应的镜面反射方向。注意,反射面的两侧都可以反射光线。
- 平面中还有一些激光光源,每个光源位于一个坐标为整数的点上,会向某个水平或竖直的方向发射一定强度的激光。
- 所有的反射面都不是完美的,每个反射面有一个折损系数$a$,当强度为$I$的光线照射上去时,反射光线的强度会变成$aI$。为了便于处理,你可以认为所有反射面的材质均不算太好也不算太糟,因此所有的$a$均在$0.2\sim 0.8$的范围内。
- 在一些超高速摄影问题中,有时甚至连光速都要考虑在内。在这个问题中,我们不妨假设激光在$1$单位时间内恰好移动$1$单位距离。然而,超高速摄影带来的往往是采样精度的损失,因此对于一束激光,最终采样到的光线强度都是向下取整后的数值。特别地,当一束激光的强度小于$1$时,认为其已经完全耗散。
- 问题的最开始,平面上没有反射面也没有光源。接下来你需要处理若干个操作,每个操作形如:
- $x_1$ $y_1$ $x_2$ $y_2$ $a$:在平面上插入一个分别以$(x_1,y_1)$和$(x_2,y_2)$为端点,反射系数为$a$的反射面,保证反射面与坐标轴成$45$度角摆放,且不与先前已经存在、且还没有被删除的反射面在非端点处相交;另外受到渲染效率的影响,问题中的所有反射面的总长度(可以理解为所有的$|x_4-x_2|$之和)不会太大。
- $k$:删除第$k$个操作插入的反射面,保证第$k$个操作发生在当前操作之前且为一个插入操作,且这个反射面还没有被删除;
- $x$ $y$ $d$ $I$ $t$:在$(x,y)$位置放置一个光源,发射光线的方向为$d$,强度为$I$,求其所经$t$时刻后光线到达的坐标以及采样得到的光线强度。其中$d$的含义为:$d=0$表示沿$x$坐标增加的方向,$d=1$表示沿$y$坐标增加的方向,$d=2$表示沿$x$坐标减小的方向,$d=3$表示沿$y$坐标减小的方向。另外,保证光源不位于当前存在的某个反射面(不含端点)上。注意:如果$t$时刻后光线刚好到达某个反射面,则其强度取反射后的强度。
- 输入格式:
- 从标准输入读入数据。
- 第$1$行,一个正整数$m$表示操作的总数量。
- 接下来$m$行,每行描述一个操作,格式如题目描述。
- 其中,除了所有的$a$和$I$以外的输入均为绝对值不超过$10^9$的整数,其中$k$和$t$为正整数;$a$和$I$均为小数点后不超过$6$位的正实数,其中$a$在$0.2\sim 0.8$之间,$I\leq 10^9$。
- 输出格式:
- 输出到标准输出中。
- 对于每个查询操作输出一行,$3$个整数,形如 $x$ $y$ $I$ 表示激光最终到达的位置为$(x,y)$,采样得到的光线强度为$I$。特别地,如果采样到的光线强度为$0$(即光线已耗散),你也就无需关心最终到达的坐标,而只需要输出0 0 0即可。
- 题目数据保证,你可以在计算时直接使用$64$位浮点数的运算和取整操作,而无需担心可能的精度误差问题。
数据范围:
测试点编号 $m\leq$ 特殊性质 $1\sim 3$ $1000$ 所有光线$t\leq 1000$,所有输入坐标的绝对值$\leq 1000$ $4\sim 7$ $1000$ 无 $8\sim 10$ $10^5$ 所有光线的$t\leq 10$ $11\sim 13$ $10^5$ 所有$1$操作在所有$3$操作之前,且无$2$操作 $14\sim 16$ $10^5$ 所有光线的$I=1$ $17\sim 20$ $10^5$ 无 对于$100\%$的数据,保证$m\leq 10^5$,所有反射面的$|x_1-x_2|$之和不超过$3\times 10^5$
# 未完待续...
| 代码长度 | 编程语言 | 评测结果 | 得分 | 时间使用 | 空间使用 |
|---|---|---|---|---|---|
| PYTHON |